
Independence as a baby? Seems counterintuitive, but it’s simple, really. Time and time again, babies (ages 1-2) make a mess when they’re trying to eat, but parents will nevertheless encourage them to eat with their own two hands. It’s not that the child is incapable of eating without making a mess, it’s just that they’re working with an unsteady hand and underdeveloped motor capabilities. But we still want them to learn to eat independently… it teaches a sort of self-reliance and confidence from a very early age. Could do without the mess, though. That’s why we developed Equilibri-YUM.
{kind=link}
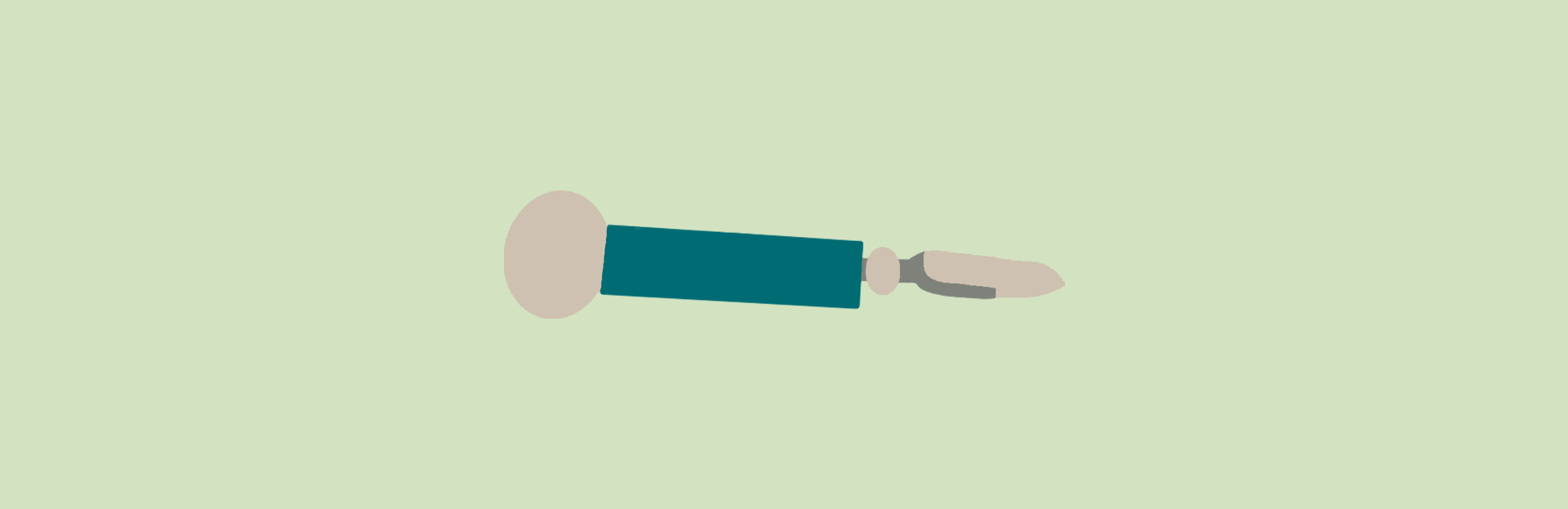
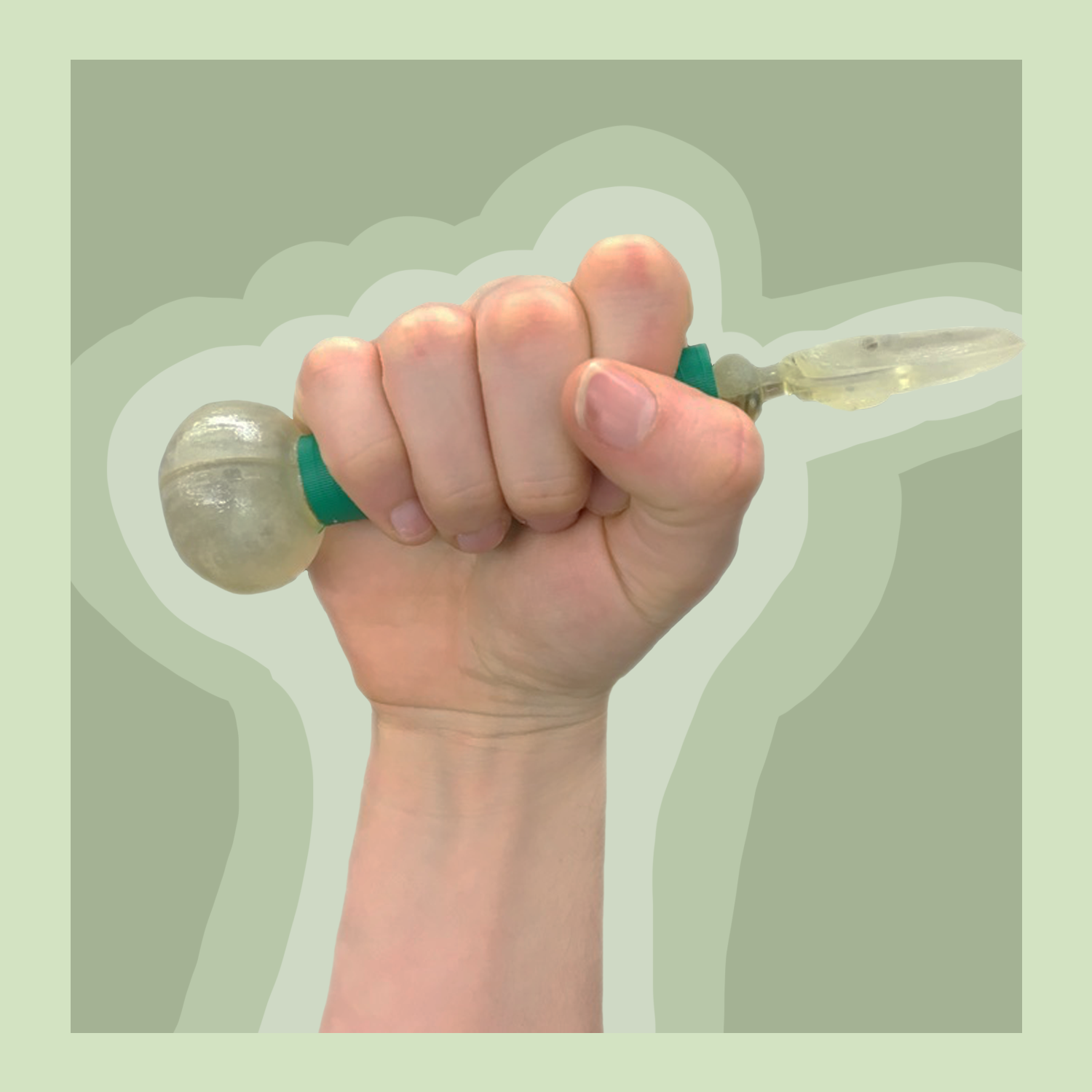
Equilibri-YUM is an ergonomic self-balancing baby spoon that makes the transition from parental feeding to independent eating easy and mess free.
Problem & Need Statement
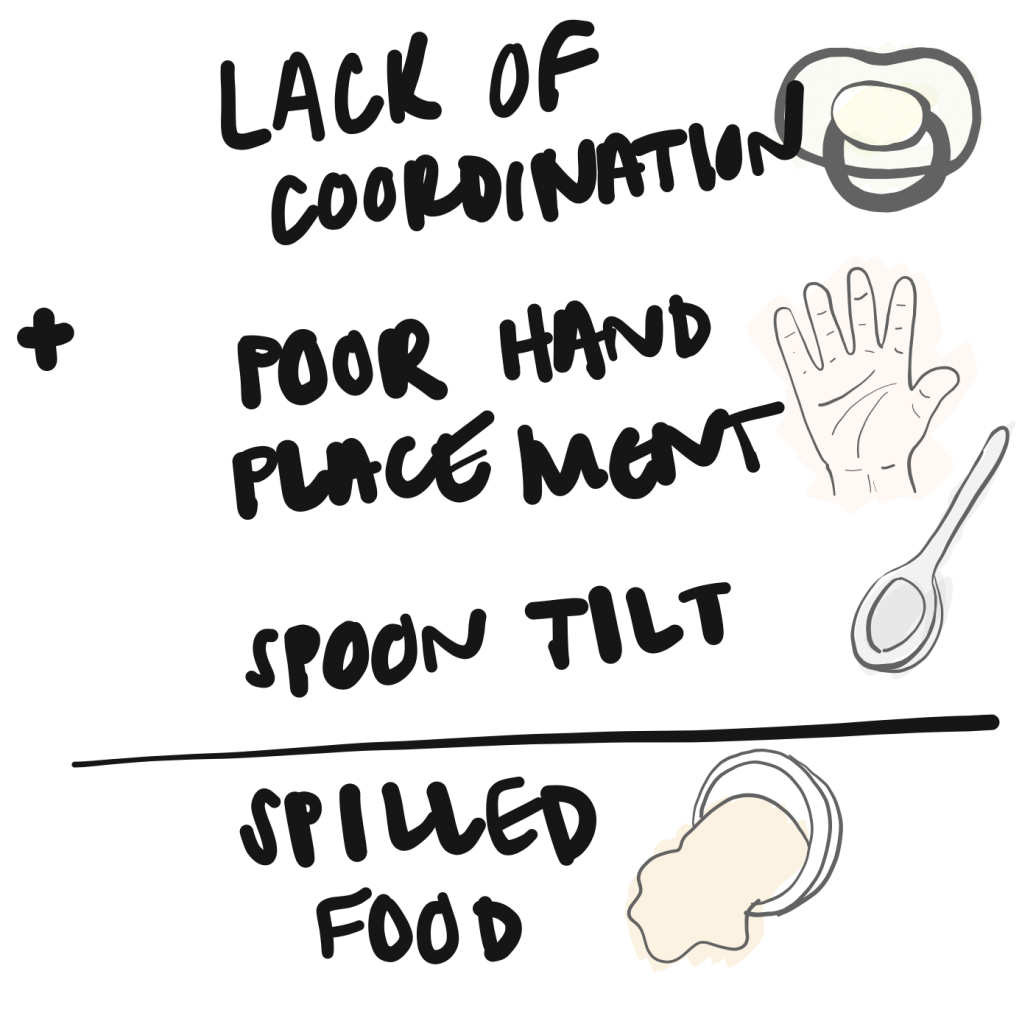
Kids have trouble holding traditional spoons due to poor hand placement and lack of coordination. As a result, food falls out of the spoon and makes a mess (for the parent to clean up). Alternatively, parents spoon-feed their child, which encourages dependence.
Children need eating utensils that are intuitive and natural for them to use when first learning to eat. Parents and caretakers alike seek child-specific spoons so that their children can learn to eat without assistance.
Project Goals
A lot of thought was put into what specifications would make this project a success. In order for our product to be practical, we wanted to develop a novel idea that was safe, cost-effective, ergonomic, and (of course) functional. We wanted to design a product from the ground up in ten weeks.
Brainstorming & Initial Prototyping
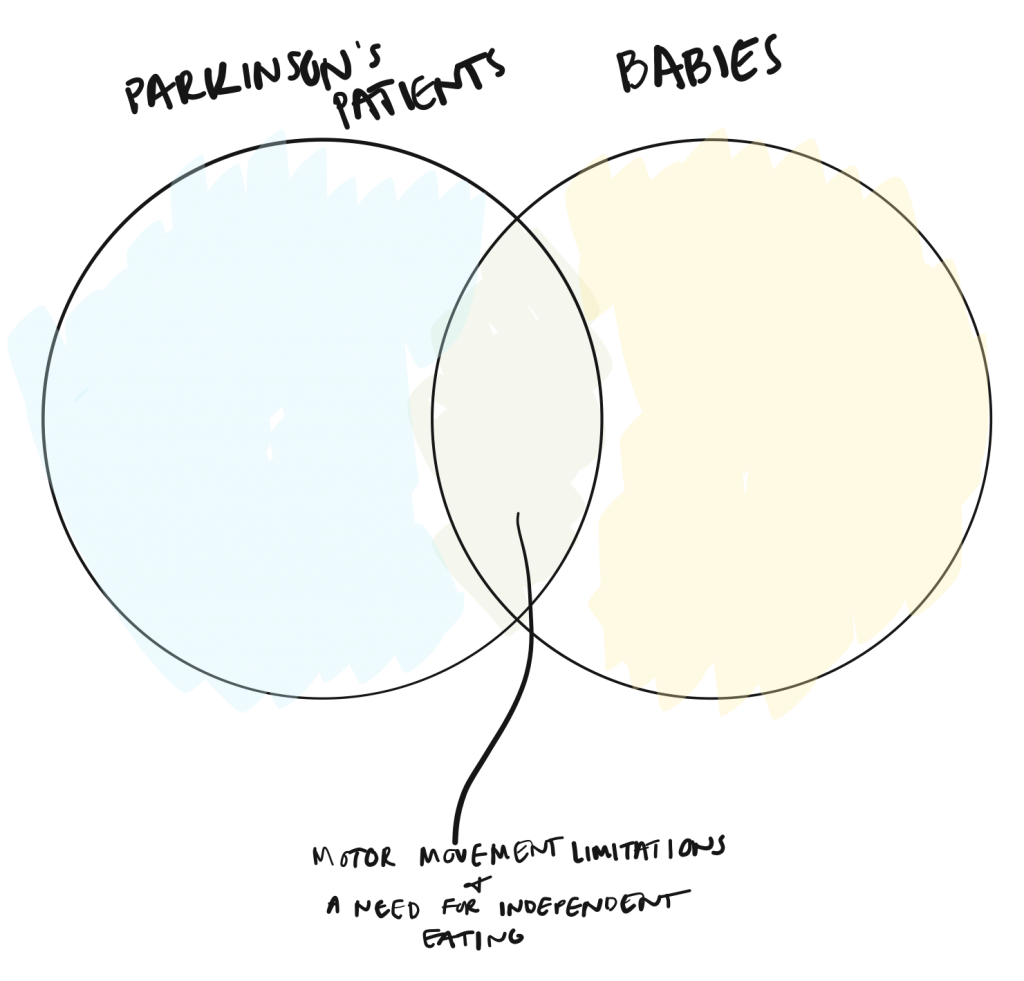
Our needfinding process consisted of many mass-brainstorming sessions centered around common problems that we have personally observed. After filling up several whiteboards worth of ideas, we discussed Parkinson’s patients and their state-of-the-art self-balancing eating utensils. Building from that, we realized that a key user-group that could utilize a simplified version of these utensils was babies. Commonalities between the groups included the desire for independence coupled with limitations on motor movement/coordination.
We did some research on our anticipated user-group and the state-of-the-art. At the time of development, the solutions for children learning to eat were confined to single-axis rotational spoons and spoons with a ‘lip’ for catching food. It became clear to us that our need was prominent.
We began building initial prototypes based on our research and based on movements from children that we studied at the Dartmouth Childcare Center. We noticed that two major problem points for independent eating with children were the child’s hand placement on the spoon and lack of stability when eating. Our main focus was to address these two points. How did we approach this? Prototype, prototype, prototype.

Quick Prototypes 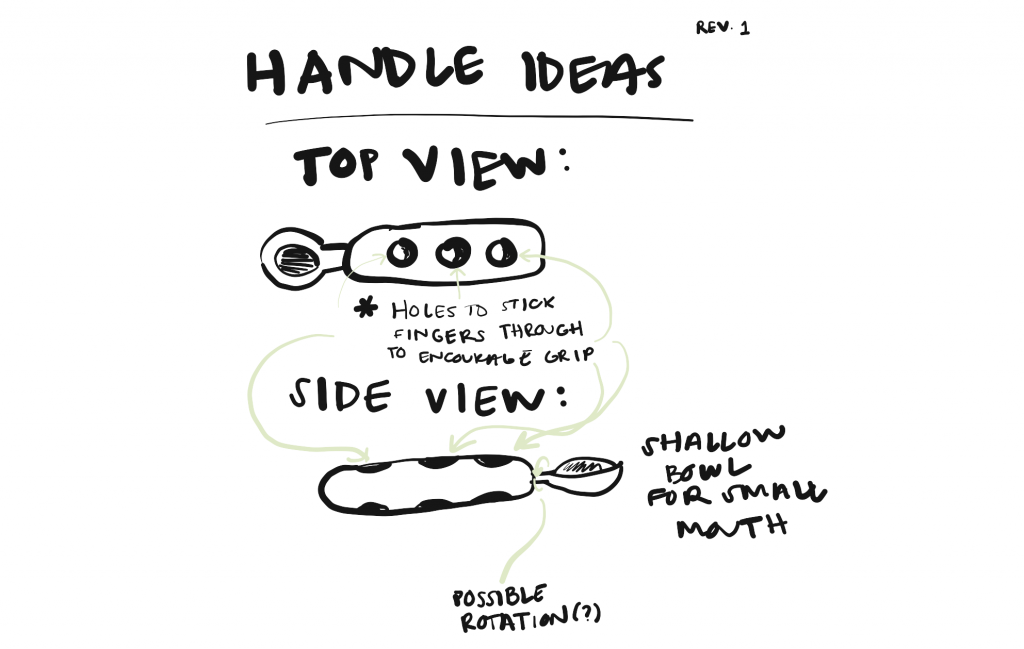
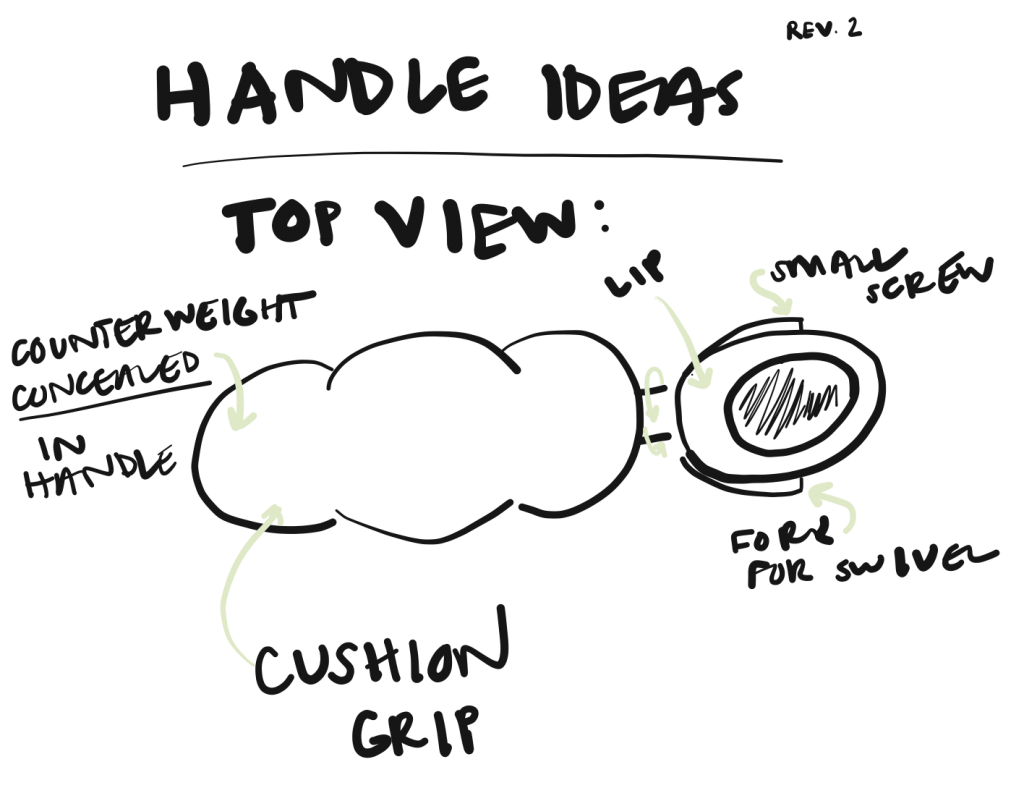
Initial Prototype Ideas 
Quick Prototypes
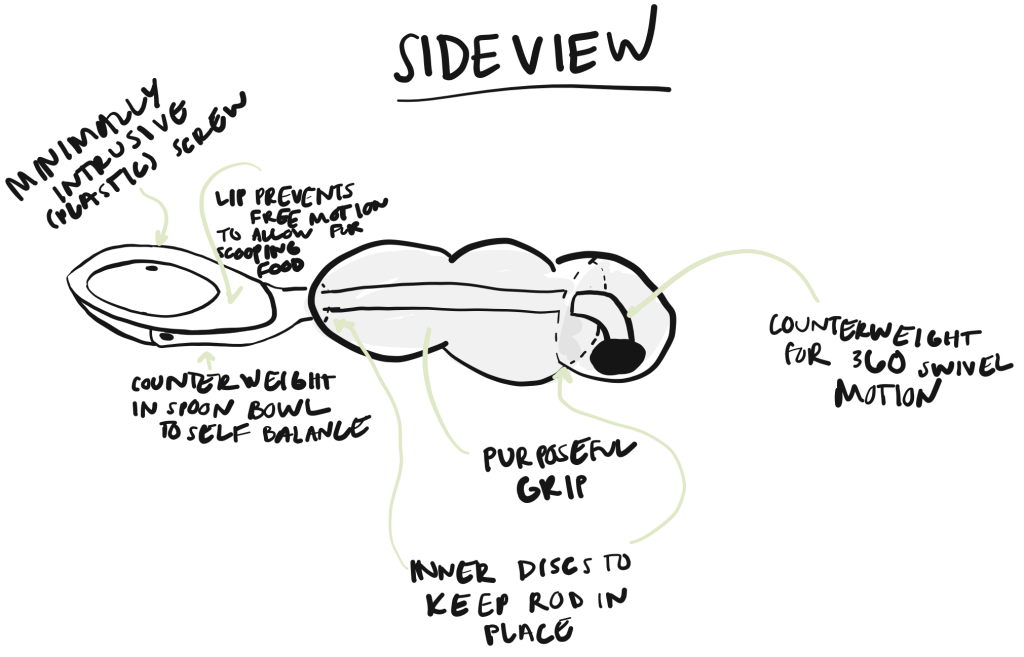
Once we had a better idea of how we wanted our spoon to actually work (2-axis rotational motion), we started drawing up more ideas and making more accurate prototypes
Brought to life…
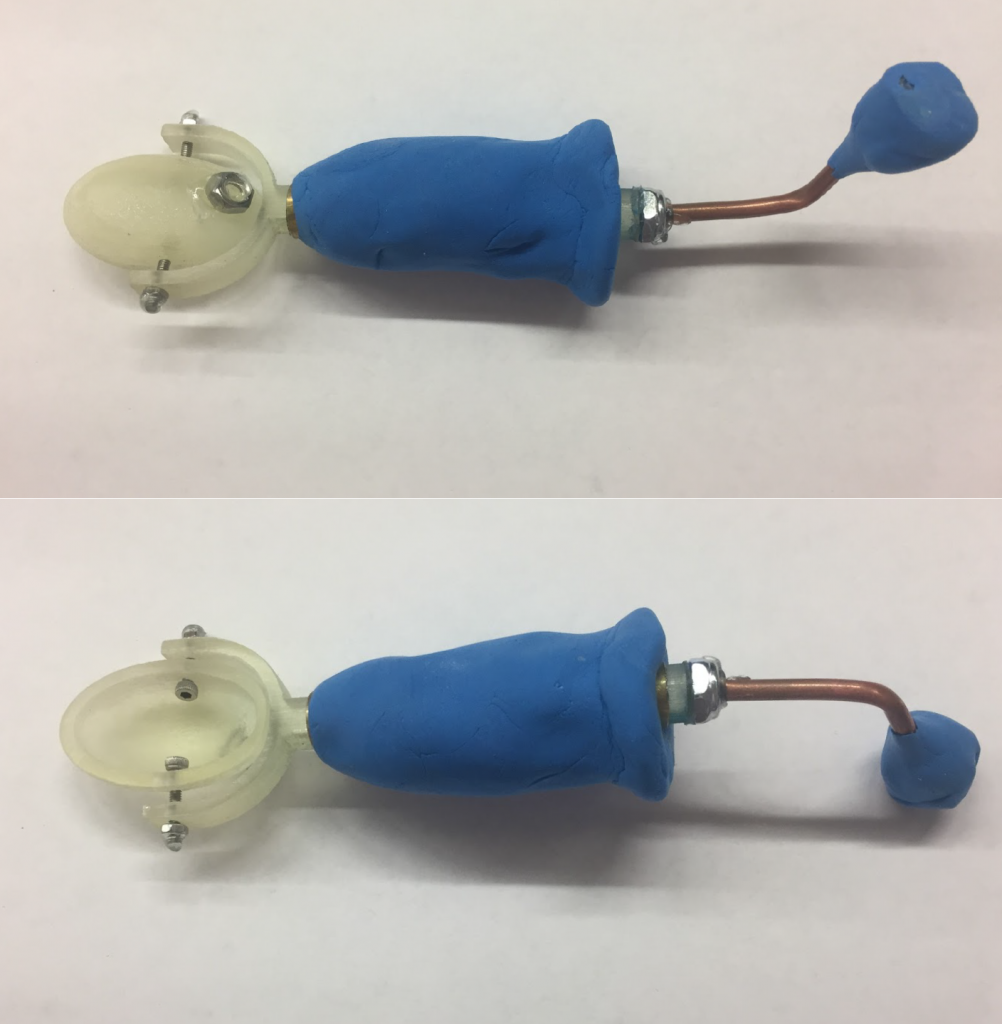
Final Prototype
After developing many iterations of our initial prototype, we identified multiple problems that we needed to address: the shape of the spoon bowl, the intrusive screws, and limitations of our free rotation.
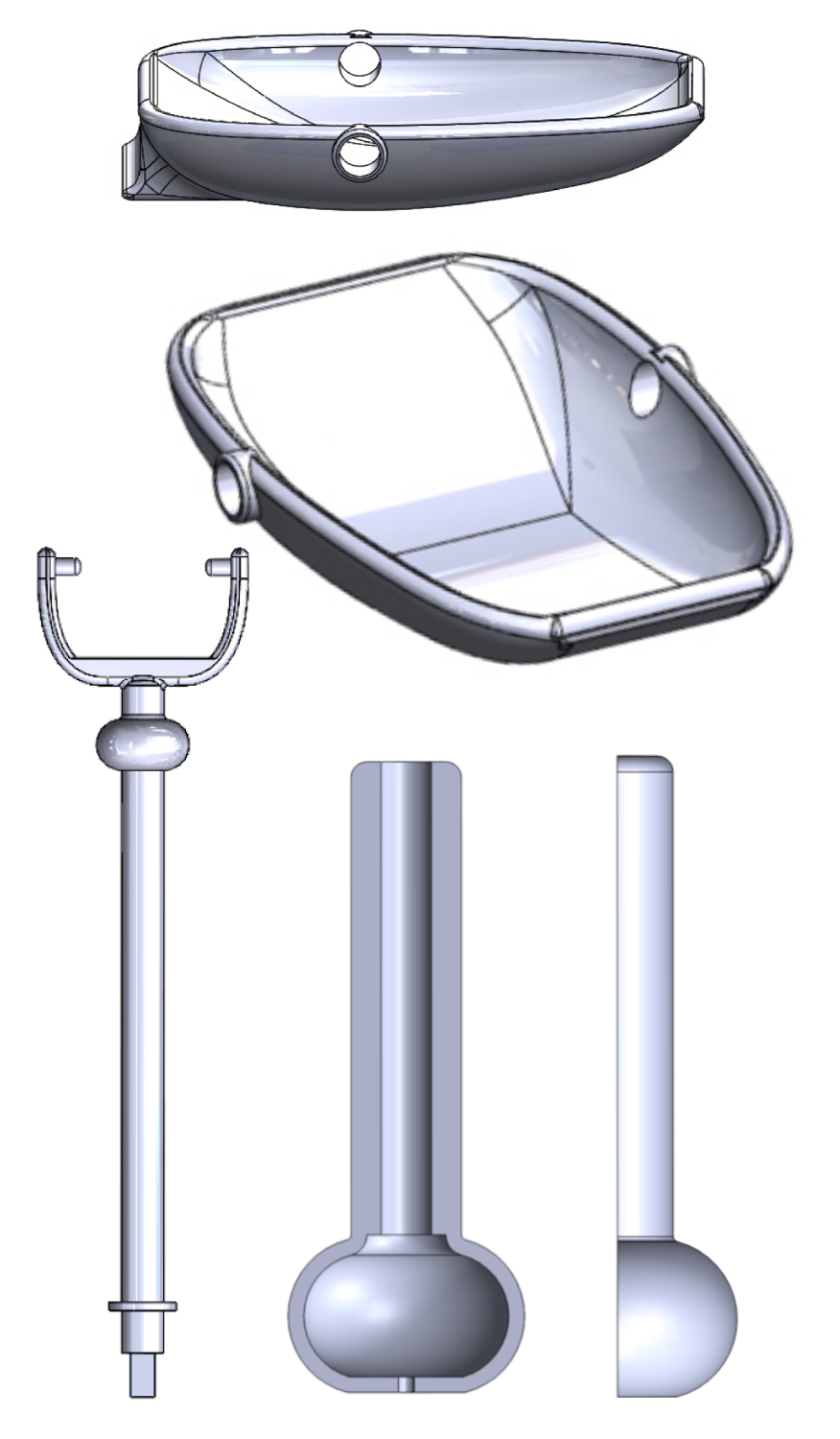
We wanted to develop a spoon bowl that was conducive to an infant mouth, rather than a shape more ergonomic for an adult mouth. This meant smaller proportions and less depth.
There was also the issue of the screws sticking out of the bowl/’fork’ piece, which we categorized as a potential hazard. In order to fix that, we incorporated the pin points of connection directly into the ‘fork.’ This effectively negated the potential hazard.
Lastly, we realized that our spoon’s freely rotational nature introduced the problem of the child actually scooping food. With the free rotation at the spoon bowl, it was virtually impossible to scoop any food (because the bowl would just rotate instead of acquiring any food). That’s where we revolutionized the product. We introduced a lip into the design of the spoon bowl, which limited half of the bowls rotational capability. However, it meant that children could actually pick up food (which I would argue is a pretty vital part of the eating process) while still having self-balancing effects in tact.
Final Prototype Details
Proposed Production Material
BPA-Free Polypropylene: a lightweight, ductile, and SAFE plastic
Spoon Handle Length
Minimized in order to minimize moment about the spoon bowl pivot point
Spoon Handle Circumference
Tailored to the average child’s hand size (no more than 4 inches) for a comfortable grip
Bowl Length
4cm, the average spoon bowl length
Bowl Width
Minimized to 2cm, which is .9 cm smaller than comparable spoon bowl widths. This makes the spoon bowl an easier fit for the child’s mouth, while still being able to hold and average of 10 grams of baby food (which is equivalent to all other state-of-the art spoons)
Projected Price Point
Low material and production costs would give us the opportunity to sell our spoon at a competitive price point as compared to state-of-the-art spoons ($2-$9).
Project Takeaways
Novel Idea ✓ | Safe & Economic ✓ | Ergonomic ✓ | Functional ✓
This project was crucial in both my engineering and design trajectories. It was my first exposure to holistic product design and development and gave me hands-on experience of the prototyping process. We spent a LOT of our time refining our prototypes and iterations. In fact, our group received high-praise from the review board for both group dynamics and prototype development.
This project was also a great teaching point in working with consumers/users for what they need. We had a difficult time testing with actual children, as our prototypes were never made of safe materials (due to issues with plastic molding & all around accessibility to such materials). That made it harder to assess what areas were problematic vs. not, but we were able to successfully work around those obstacles.
Hey, holistic product development in 10 weeks is hard. Who knew?